pab Ltd Studie Steilhang Fahrzeug (ATV)
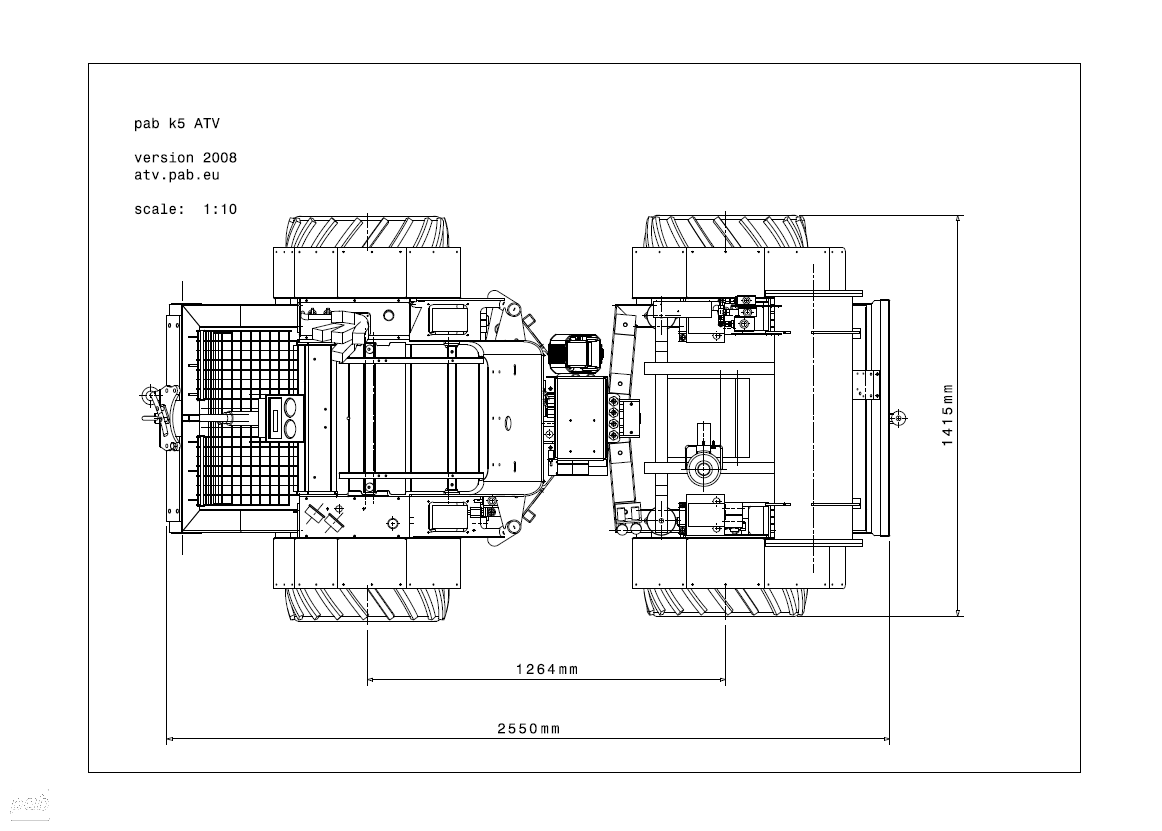
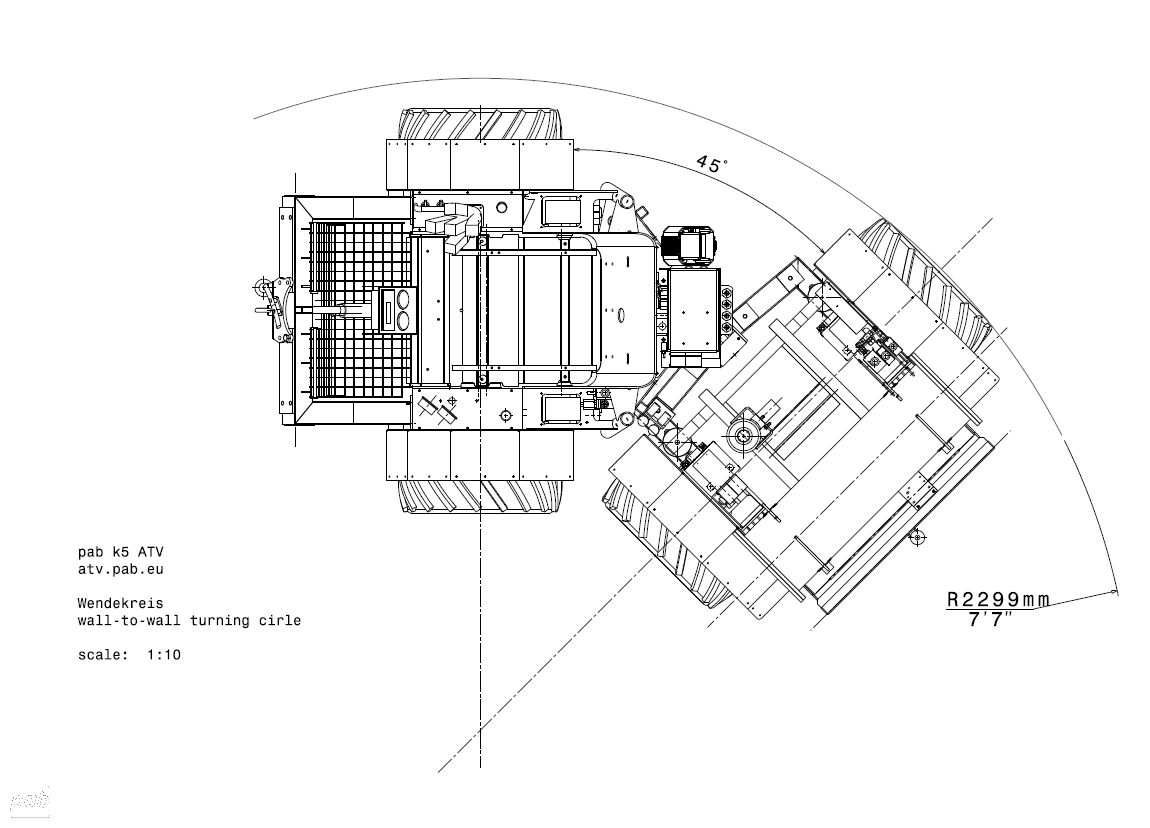
- Breite 1.4m , Länge 2.5m, Radstand 1.2m , Wendekreisdurchmesser 4.6m
- Zugkupplung vorn/hinten, Zusatzhydraulik vorn/hinten
- Chassis in modularer Schweiß/Schraub-Ausführung
- vollständige software Steuerung ("drive by wire")
- derzeit (2012) erprobte maximale Hangneigung: 35°
Vorgegebene Parameter
- Ziel: Erfahrung in Traktion, Fahrverhalten, Steuerung und Algorithmen von zwei-achs Fahrzeugen bei Hanglagen
(ATV="all terrain vehicle")
- Arbeitsgelände: Wiesenfläche mit Hangneigung zwischen 25° und 45°
- maximal konstruktiv kippsicherer Betrieb
- maximale Traktion bei exakter Kontrolle
- weitgehendste Bodenschonung (digitale "Differentialsperre")
- maximale Breite 1.4m
Details des Prototyps
- 4x4 Antrieb mit aktiver, digitaler Drehzahlvorgabe für jeden einzelnen Radmotor
- Dieselmotor Hatz mit Sonderölwanne für sicheren Betrieb bis 45° Schräglage
- elektronisch geregelte, verstellbare Axialkolbenpumpe, mit konstantem, elektronisch vorgegebenen Druck, je nach gefordertem
Drehmoment am Rad
- ölhydraulischer Einzelradantrieb mit Radialkolbenmotoren Poclain
- Lenkwinkel ± 45° , Torsionswinkel ± 20°
- Linux basierter Regelkreis und Lenksteuerung per Industrie-Joystick
- zweiter, redundanter Bremskreis mit je einer federbelasteten Lamellenbremse pro Rad, drucklos=bremsend
- Fernsteuerung möglich
Lösungsweg
- rad-basiert bevorzugt über ketten-basiert
- Auswahl des Lenkkonzepts: Knick-Lenkung bevorzugt über Front-/Heck-Lenkung (Stand 2008)
- Festlegung geometrische Grundparameter durch Modellbau und Simulation
(diese Version intern als 5ten Entwurf, k5 bezeichnet)
- Auswahl des Antriebsystem: diesel-hydraulisch bevorzugt über diesel-elektrisch (Stand 2008)
- Auswahl des Radantriebs: hoher Wirkungsgrad bei kleiner Drehzahl
- Konzept Hydrauliksystem mit elektronischer Regelung pro Rad, CAN Bus basiert
- Teststand für Hydraulikantrieb
- Chassis Entwurf und Ausarbeitung
- Konzept, Umsetzung und Weiterentwicklung der Software für drive-by-wire
- Weiterentwicklung des Antriebssystems
Kontakt
web address of this page: http://atv.pab.eu?d=/
page contents ©2024 pab
pab advanced technologies Ltd