pab Ltd study drive principles on steep terrain (ATV)
- extremely low centre-of-gravity
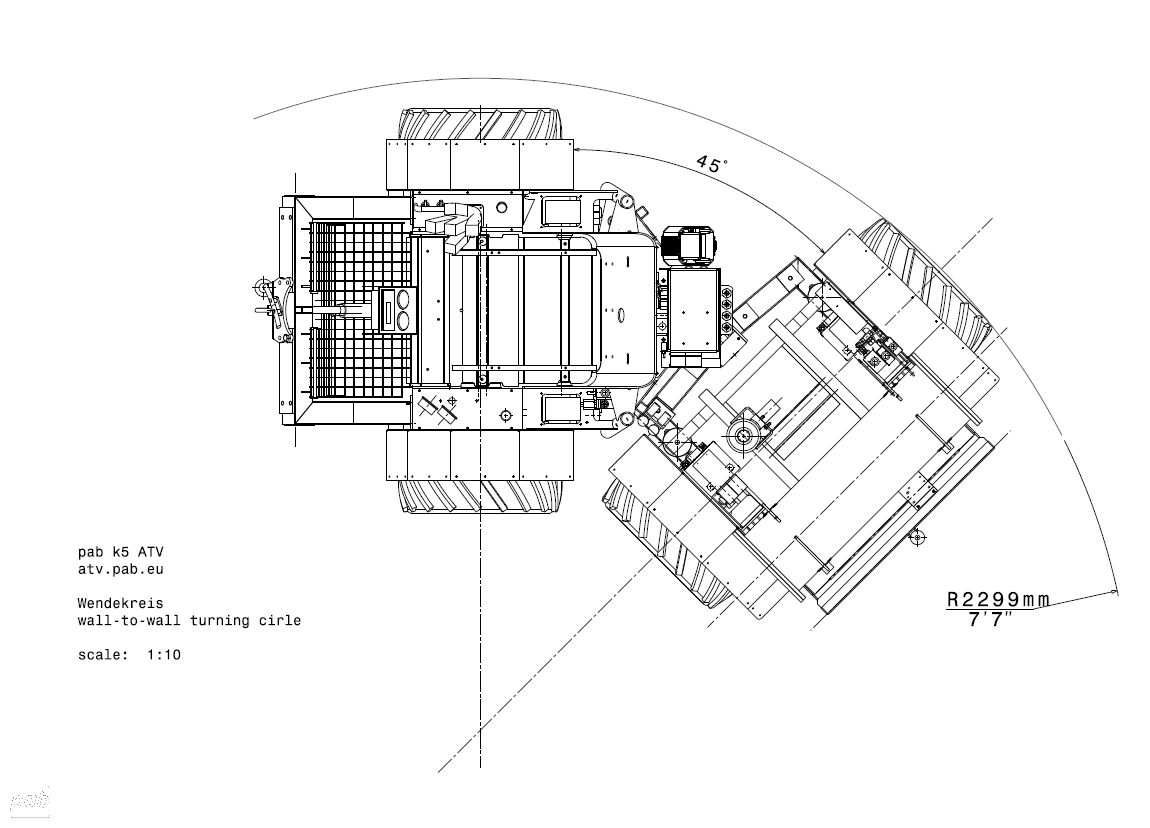
- very tight turning circle
- very precise low speed control
- maximal traction
- complete software drive, joystick input ("drive by wire")
- designed for a maximum inclination of terrain: 45°
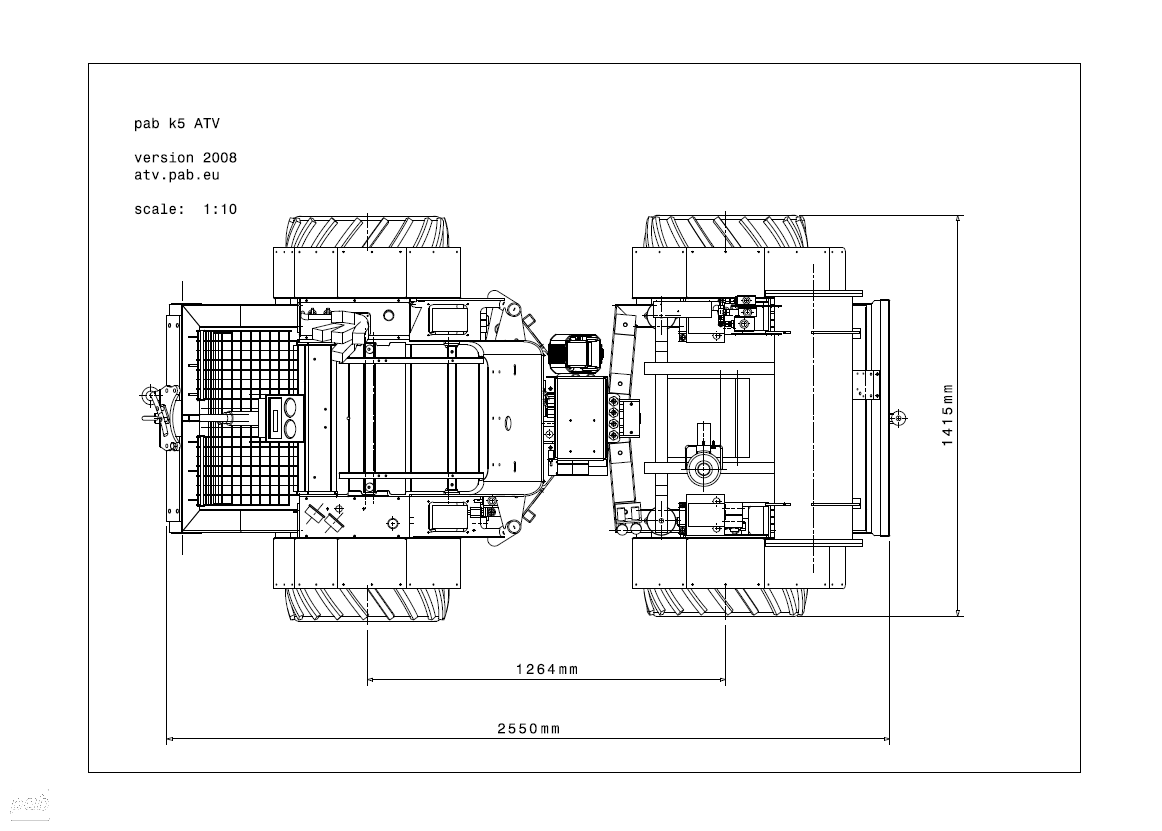
- modular chassis,
width 1.4m , length 2.5m, wheelbase 1.2m
key parameters
- aim of project: gather experience in control- and drive-algorithms for 4x4 vehicle in steep terrain with full traction
control
- work area: grass surface with an inclination between 25° and 45°
- optimise tilt-safety around any axis by design
- maximise traction while leaving grass surface mostly intact
- all-digital differential control
details of k5-test1
- distributed four-wheel drive with active speed control, CAN bus controlled for maximum traction
- diesel engine made by Hatz with custom oil sump for continuous operation up to 45° tilt
- computer adjustable, variable displacement axial piston pump made by Bosch for high efficiency
- hydraulic driven radial piston wheel motors for efficiency and fine control at very low RPM
- steering angle ± 45° , twist angle ± 20° for maneuvers in tight space
- Linux based control for reliability
- second, redundant break system (dead-man-switch)
- optional remote control (although much less fun)
considerations that had lead to first version
- wheel-based preferred over track-based
- steering concept: articulated-frame steering preferred
- test of geometric parameters by simulation and physical models
(version dubbed k5 since it had been the 5th version during preliminary planning)
- hydraulic preferred over electric drives (well- that is open to discussion now)
- hydraulic motors with high efficiency at lowest RPM
- electronics for low speed control of hydraulic flow
- including extra set-up to test low-speed, variable load control of hydraulic motors
- in-service use of vehicle to gain practical experience for drive techniques on inclined slopes
- identify key optimisations for next generation
contact
web address of this page: http://atv.pab.eu?d=/
page contents ©2025 pab
pab advanced technologies Ltd